Section: Software
SOFA
SOFA, the Simulation Open Framework Architecture, is an international, multi-institution, collaborative initiative, aimed at developing a flexible and open source framework for interactive simulations. This will eventually establish new grounds for a widely usable standard system for long-term research and product prototyping, ultimately shared by many academic and industrial sites. Over the last two years, the SOFA framework has evolved from an informal collaborative work between the Sim Group at CIMIT, the Alcove, Asclepios and Evasion teams at Inria into a more structured development project. By proposing a unique architecture allowing the integration of the multiple competencies required for the development of a medical training system, we believe it will be possible to accelerate and foster research activities in the field of interactive medical simulation. The main objectives of the SOFA framework are:
Simplify the development of medical simulation systems by improving interoperability
Accelerate the prototyping of simulation systems by promoting component reusability
Facilitate technology transfer between research and industry
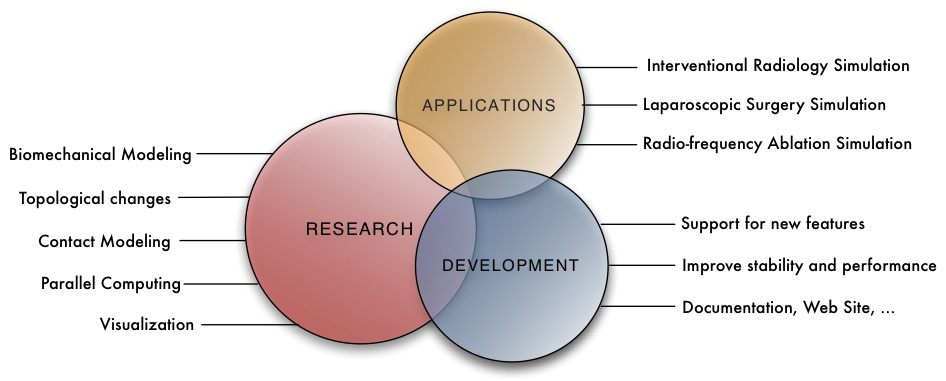
Our activities around the SOFA framework will be twofold. We will remain one of the leading teams contributing to the design of SOFA, the development of its architecture and its distribution to research groups and industrial partners. In addition, we will use SOFA as a core element of most of our simulations, as a mean to facilitate the integration of results from partners of the national initiative, and to simplify the development of prototypes of simulation systems. For the past few years, there have been a few attempts at designing software toolkits for medical simulation. Examples include [36] , GiPSi [25] , SPORE [35] or SSTML [22] . These different solutions aim at the same goal: providing an answer (usually Open Source) to the various challenges of medical simulation research and development. Although our aim is similar, we propose a different approach, through a very modular and flexible software framework, while minimizing the impact of this flexibility on the computation overhead. To achieve these objectives, we have developed a new architecture that implements a series of innovative concepts. Also, by developing the SOFA framework collaboratively with scientific experts in the different areas of medical simulation, we believe we can provide state-of-the-art solutions that are generically applicable, yet computationally efficient. The following sections describe in more details our approach to the development of this framework, from a technical standpoint and from the perspective of a collaborative work.
|
SOFA architecture
Medical simulation relies on a variety of interacting physics-based models, such as rigid structures (e.g. bones), deformable structures (e.g. soft-tissues) and fluids. It also involves anatomical representations through geometrical models, used for visual rendering, collision detection or meshes that will support various computational models. Finally, interactions between these different models need to be efficient, accurate and capable of handling a variety of representations. In some instances, a hierarchy also exists between the various anatomical structures, and needs to be taken into account in the description of the simulated environment. The design of the SOFA architecture, by supporting these various requirements, brings the flexibility needed for academic research. Yet, its very efficient implementation makes it also suitable for professional applications and potentially for product development. This architecture relies on several innovative concepts, in particular the notion of multi-model representation. In SOFA, most simulation components (deformable models, collision models, medical devices, etc.) can have several representations, connected through a mechanism called mapping. Each representation is optimized for a particular task (e.g. collision detection, visualization) while at the same time improving interoperability by creating a clear separation between the functional aspects of the simulation components. As a consequence, it is possible to have models of very different nature interact together, for instance rigid bodies, deformable objects, and fluids. This is an essential aspect of SOFA, as it will help the integration of new research components. This modular design also facilitates the rapid prototyping of simulation systems, allowing various combinations of algorithms to be tested and compared against each other. At a finer level of granularity, we also propose a decomposition of physical models (i.e. any model that behaves according to the laws of physics) into a set of basic components. In the case of (bio)mechanical models, which are computationally expensive, many strategies have been used to improve computation times or to reduce the complexity of the original model: linear elastic models have often been used instead of more complex non-linear representations, mass-spring methods as an alternative to finite element methods, etc. Each of these simplifications induces drawbacks, yet the importance of these drawbacks depends largely on the context in which they are applied. It becomes then very difficult to choose which particular method is most likely to provide the best results for a given simulation. To address this issue in SOFA we have introduced a finer level of granularity which permits to independently test and compare each component, such as time integration schemes, to see the change in performance or robustness of the simulation, or to test different constitutive models. These changes can be made in a matter of seconds, without having to recompile any of the code, by simply editing an XML file.
Current Results
Version 1.0 RC1 of SOFA was released in December 2011 but since October 2012, SOFA is now available through a public and anonymous SVN. More than 137,000 downloads of SOFA have been counted as of November 2012. More than 70 researchers, students, engineers have contributed at various degrees to SOFA, for a total of about 1,200,000 lines of code. Currently, thanks to its advanced architecture, SOFA allows to:
Create complex and evolving simulations by combining new algorithms with existing algorithms
Modify most parameters of the simulation by simply editing a XML file
Build complex models from simpler ones using a scene-graph description
Efficiently simulate the dynamics of interacting objects using abstract equation solvers
Transparently parallelize complex computations using semantics based on data dependencies
Use new generations of GPUs through the CUDA API to greatly improve computation times
Use embedded Python environment to create interactive and parametric scenes, and interact with 3rd party software
Various results and information can be obtained on the SOFA website at http://www.sofa-framework.org . Most of the current results are generic and only aim at validating the different aspects of the SOFA framework. Developments of complex medical simulations have recently started, in particular in the areas of ophthalmic surgery and interventional radiology. We have also started a collaboration with a few companies (Digital Trainers, Didhaptics, B.K.) which are in the process of developing medical applications based on SOFA.
|